(Reference) Ultrasonic Distance Sensor
Ultrasonic Distance Sensor

Wiring
| Sensor | Photon 2 | Function |
|---|---|---|
| GND | GND | Ground |
| VCC | VUSB | Power (requires 5v, but will work with 3.7V LiPo battery) |
| TRIG | Output Pin | start output pulse sequence |
| ECHO | Input Pin | receive reflection response |
Wiring Diagram

Operation
-
Operating range: 2 cm - 4 m (1 in - 13 ft)
-
Angle: 15 degrees
Timing Diagram
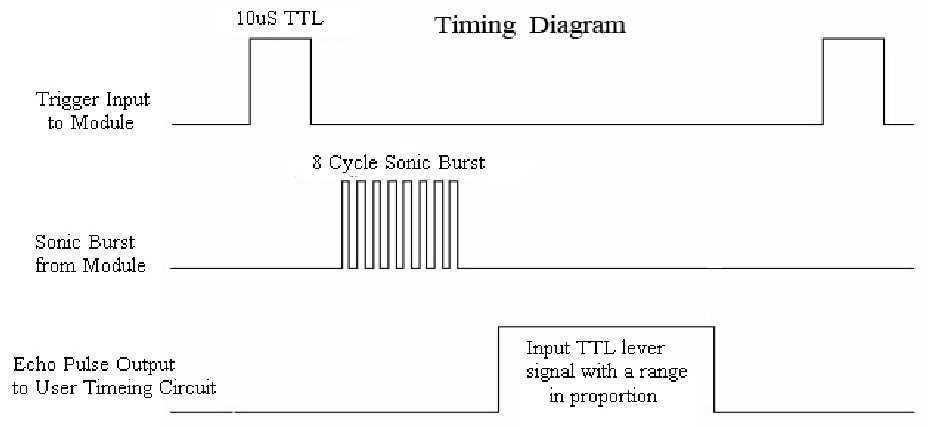
Timing Part 1: Trigger
- Output sequence
- LOW for 2 microseconds
- HIGH for 10 microseconds
- LOW
- Sensor sends out 8 sonic pulses
Timing Part 2: Echo
- Sensor “listens” for sound wave to reflect / bounce off object
- When sound wave reflection is received, echo pin goes HIGH for duration of reflection, then goes LOW
- In order to measure the time it takes for an input to be received, use the
pulseIn()
Code
const int PIN_TRIGGER = D3;
const int PIN_ECHO = D2;
double SPEED_SOUND_CM_ROOM_TEMP_FAHR = 0.03444;
int MAX_RANGE_CM = 78;
int MIN_RANGE_CM = 0;
double distanceCm;
void setup() {
Serial.begin(9600);
pinMode(PIN_TRIGGER, OUTPUT);
pinMode(PIN_ECHO, INPUT);
}
void loop() {
// start trigger
digitalWrite(PIN_TRIGGER, LOW); // prepare
delayMicroseconds(2);
digitalWrite(PIN_TRIGGER, HIGH); // prepare
delayMicroseconds(10);
digitalWrite(PIN_TRIGGER, LOW); // prepare
int timeRoundTrip = pulseIn(PIN_ECHO, HIGH); // wait for round trip time
distanceCm = timeRoundTrip * SPEED_SOUND_CM_ROOM_TEMP_FAHR / 2;
Serial.print("Dist to object:");
if (distanceCm >= MAX_RANGE_CM ||
distanceCm <= MIN_RANGE_CM) { // sensor reports values in CM
Serial.print("out of range");
} else {
Serial.print(distanceCm);
Serial.print(" cm");
}
Serial.println();
delay(500);
}